
Journal Publications
From Games to Understanding: Semantrix as a Testbed for Advancing Semantics in Human–Computer Interaction with Transformers
Semantrix: A Testbed for Advancing Semantics in Human–Computer Interaction [Electronics 14(17)]
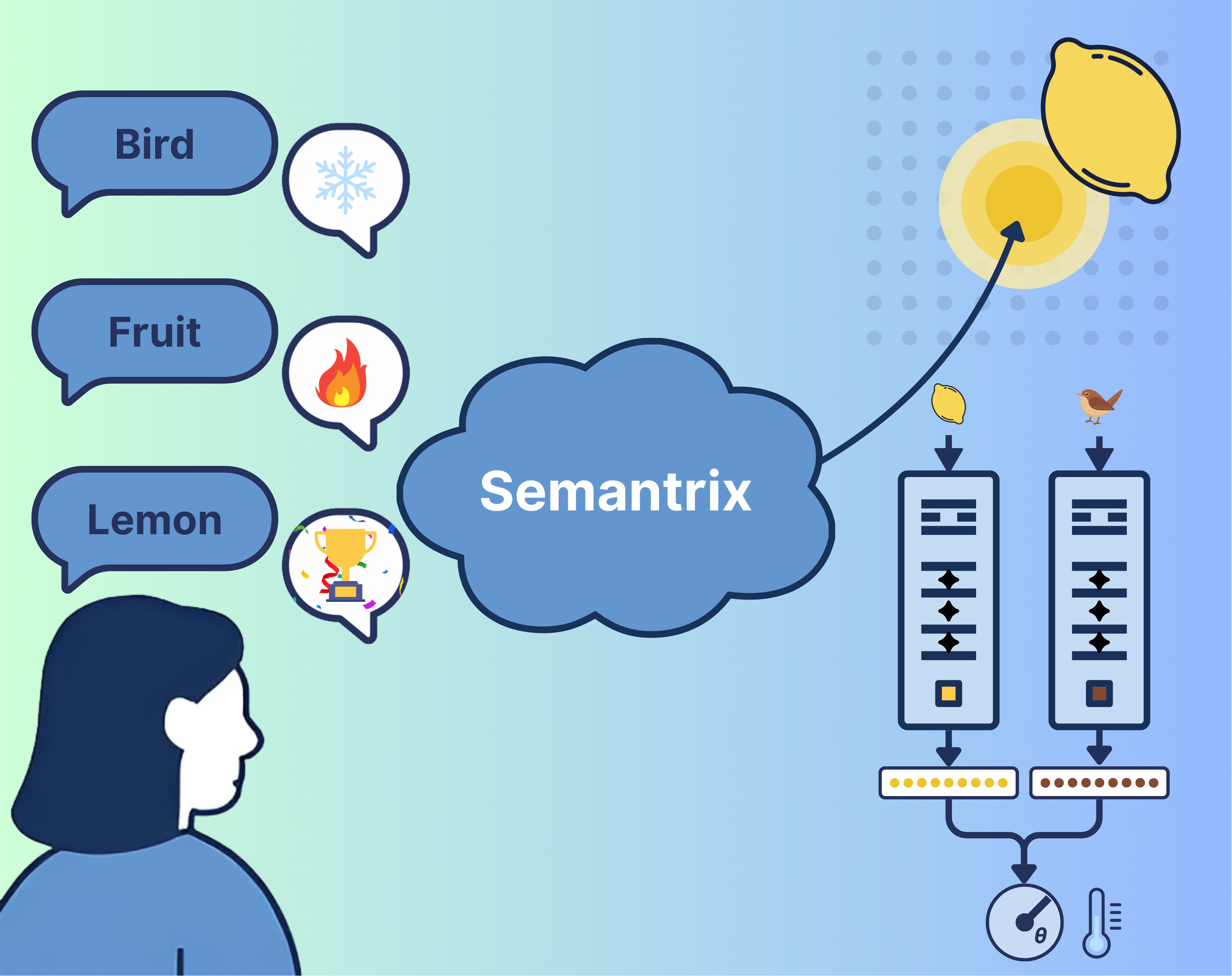
Semantrix is an interactive semantic word-guessing game that doubles as a testbed for advancing machine understanding of human language. By combining transformer-based embeddings for semantic similarity with LLM-generated adaptive hints, the platform enables exploration of ambiguity, context, and creativity in human–computer interaction. Through a user study, we show that the synergy of deep semantic models and adaptive feedback sustains engagement, motivation, and enjoyment, highlighting pathways for more intuitive and human-aligned NLP systems.
Read Publication
Predicting and Synchronising Co-Speech Gestures for Enhancing Human–Robot Interactions Using Deep Learning Models
Predicting and Synchronising Co-Speech Gestures for Enhancing Human–Robot Interactions Using Deep Learning Models [Biomimetics 10(12)]
Our system, based on a robot’s utterances, predicts the corresponding gesture and synchronises it with the speech. A deep learning-based prediction model labels the robot’s speech with the types of expressions that should accompany it. Then, a rule-based synchronisation module connects different gestures to the correct parts of the speech. For this, we have tested two different approaches: (i) using a combination of recurrent neural networks and conditional random fields; and (ii) using transformer models.
Read Publication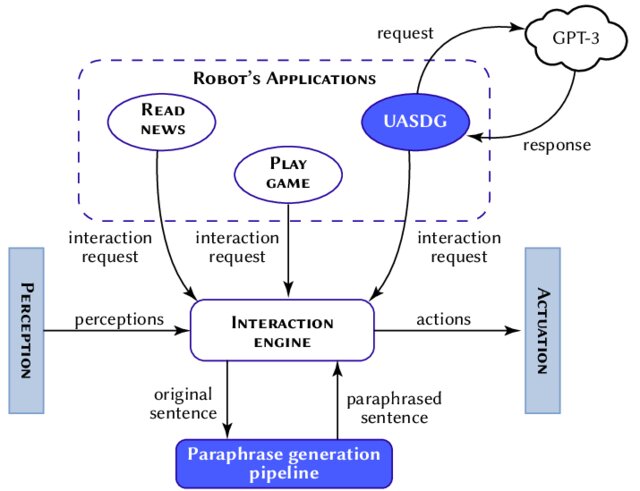
Using Large Language Models to Shape Social Robots’ Speech
Using Large Language Models to Shape Social Robots’ Speech [IJIMAI 8 (3)]
Two methods are proposed: one for rephrasing existing utterances to retain their meaning but introduce variation, and the other for creating topic-specific speech that adapts to the conversation partner. The results are promising, but challenges such as computational demands, interaction delays, reliance on proprietary models, and the need for subjective evaluation are noted as constraints.
Read Publication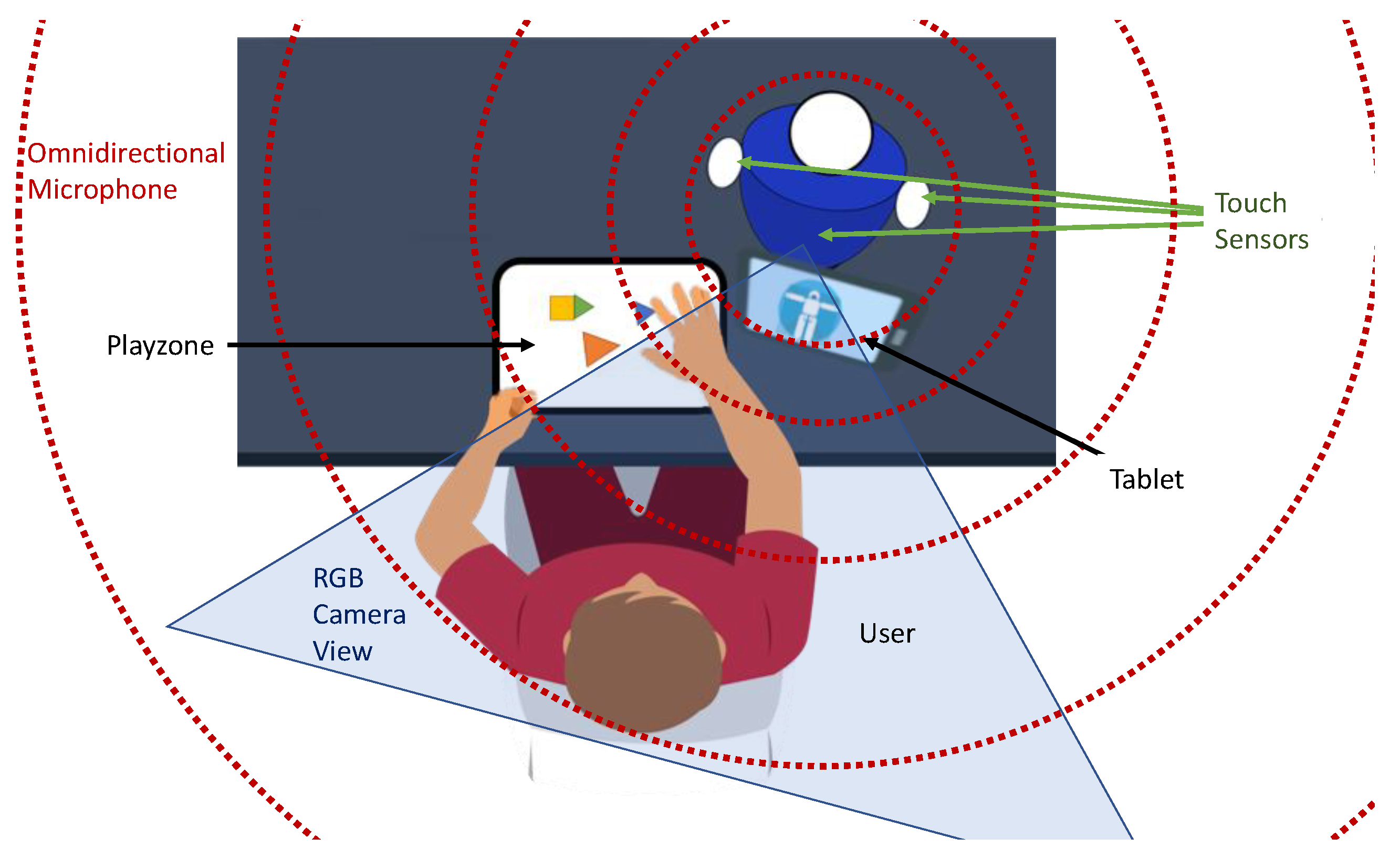
A Bio-Inspired Endogenous Attention-Based Architecture for a Social Robot
A Bio-Inspired Endogenous Attention-Based Architecture for a Social Robot [Sensors 22 (14)]
Introducing a perception architecture for social robots, inspired by endogenous attention mechanisms, enhancing robots' interaction with their environment and users.
Read PublicationInternational Conferences
GERT: Transformers for Co-speech Gesture Prediction in Social Robots
GERT: Transformers for Co-speech Gesture Prediction in Social Robots [ICSR '23]
GERT (Gesture-Enhanced Robotics Transformer), a set of three transformer-based models designed to predict gestures that align with a robot's verbal communication. The research evaluates and compares the effectiveness and efficiency of the three model variations, demonstrating that they all perform well (with F-scores ranging from 0.78 to 0.86) while highlighting the balance between model size and performance.
Read Publication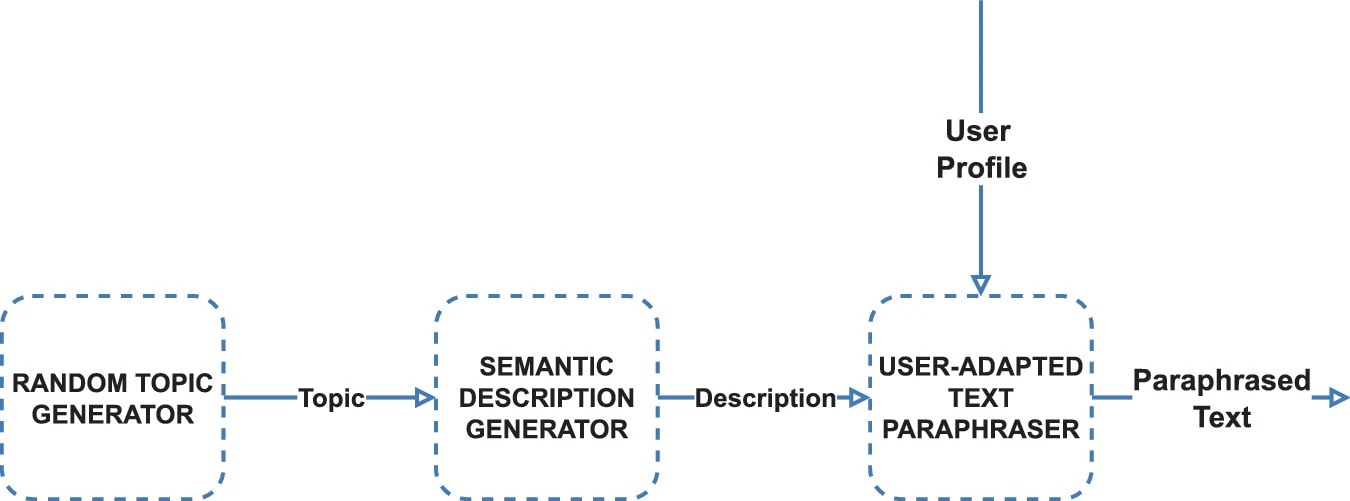
User-Adapted Semantic Description Generation Using Natural Language Models
User-Adapted Semantic Description Generation Using Natural Language Models [ISAMI '22]
Exploring the creation of user-profile-specific descriptions by employing natural language generation models to provide more fluid and natural human-computer interactions.
Read Publication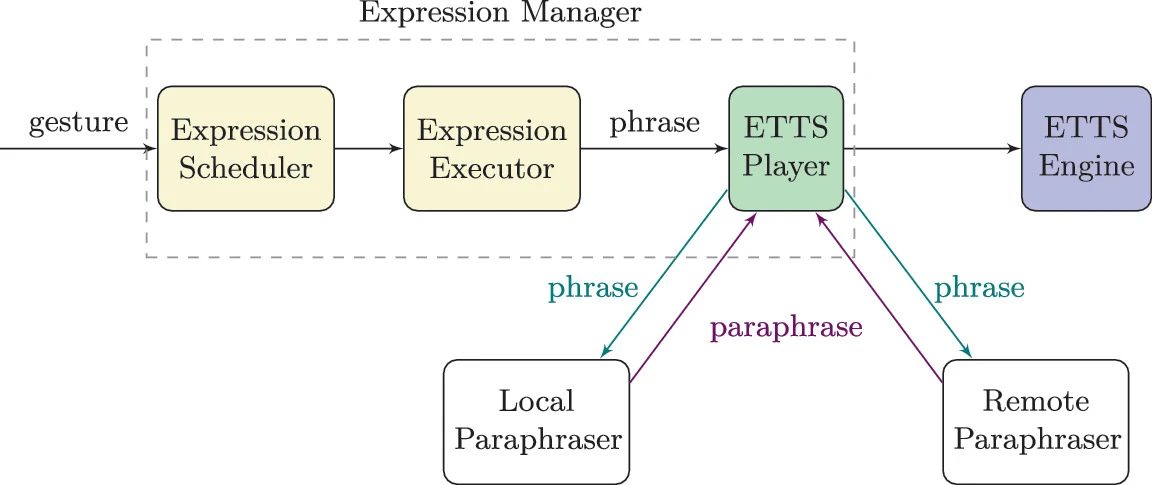
Using Deep Learning for Implementing Paraphrasing in a Social Robot
Using Deep Learning for Implementing Paraphrasing in a Social Robot [ISAMI '22]
This research enhances the conversational abilities of a social robot by introducing models capable of generating contextually appropriate Spanish paraphrases.
Read PublicationNational Conferences
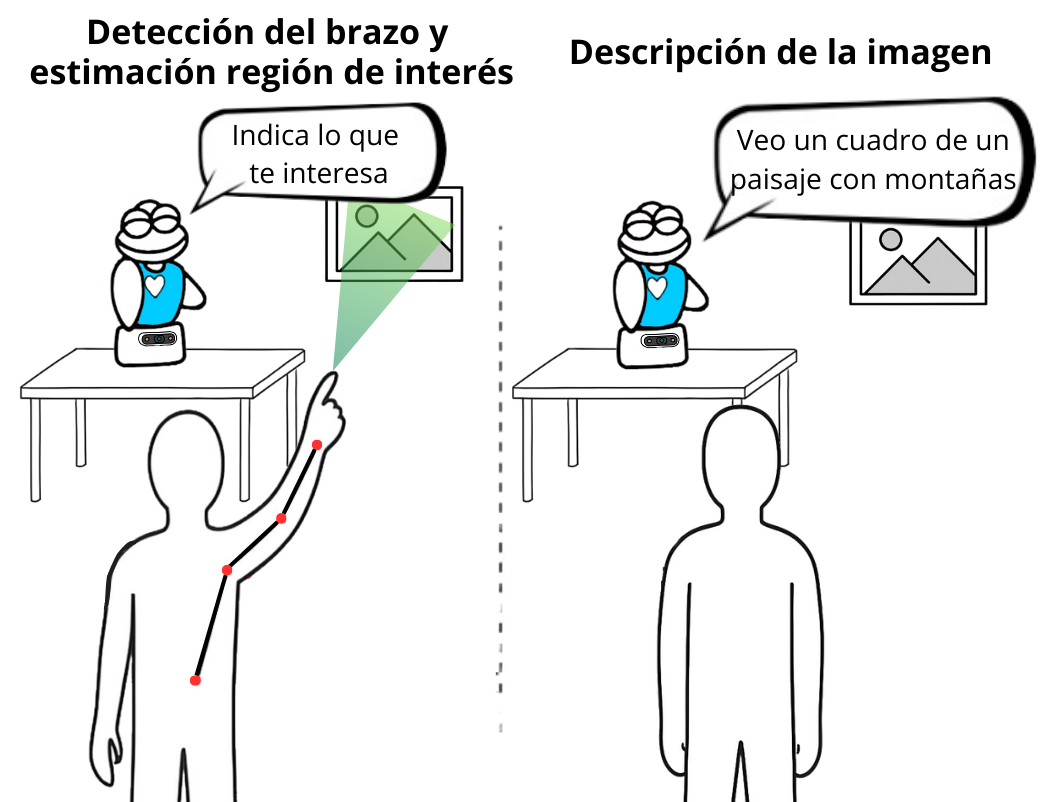
Señales que hablan: Percepción visual para describir escenas a partir de gestos deícticos en robótica social
Señales que hablan: Percepción visual para describir escenas a partir de gestos deícticos en robótica social
This article presents an interactive application integrated into the Mini social robot, combining our previous method based on RGB-D computer vision to detect where users are pointing with multimodal generative models of vision and language.
Read Publication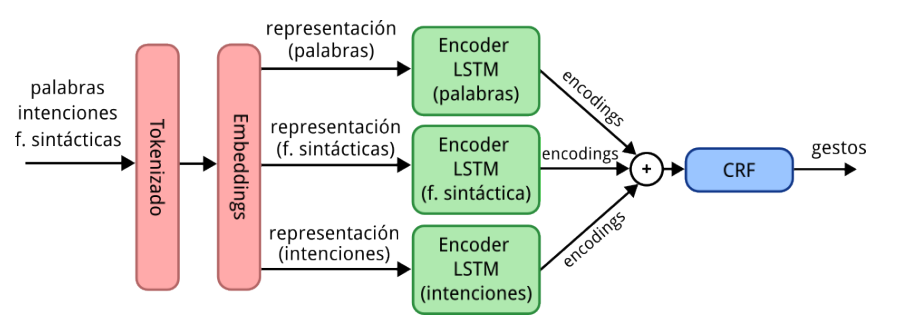
Predicción de gestos no-verbales usando aprendizaje profundo
Predicción de gestos no-verbales usando aprendizaje profundo [XLIV Jornadas de Automática]
This study introduces a deep learning system using transformer models to predict non-verbal gestures for social robots, surpassing previous techniques for natural human-robot interactions.
Read Publication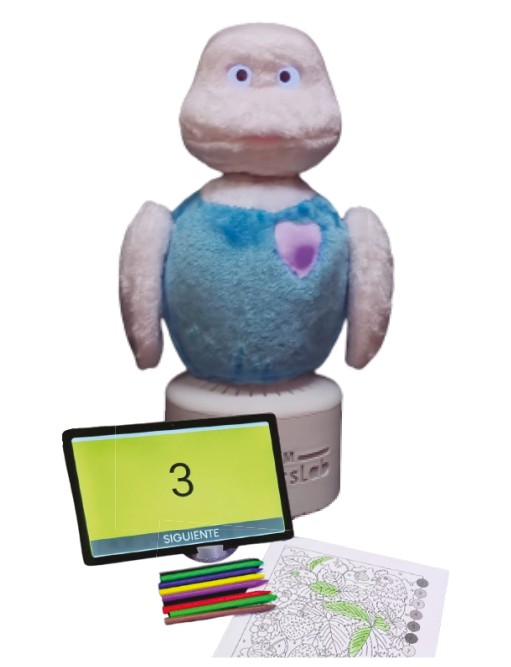
ARTETERAPIA: una estrategia para incrementar el vínculo en la robótica social
ARTETERAPIA: una estrategia para incrementar el vínculo en la robótica social [XLIII Jornadas de Automática]
Addressing the societal divide between the elderly and the young, this article proposes using art therapy with social robots to enhance the psychophysical state of older adults.
Read Publication
Modelos de lenguaje natural para robots sociales
Modelos de lenguaje natural para robots sociales [XLIII Jornadas de Automática]
Discussing the role of natural language generation models in enhancing communication of social robots and making human-robot interactions more dynamic and adaptable.
Read Publication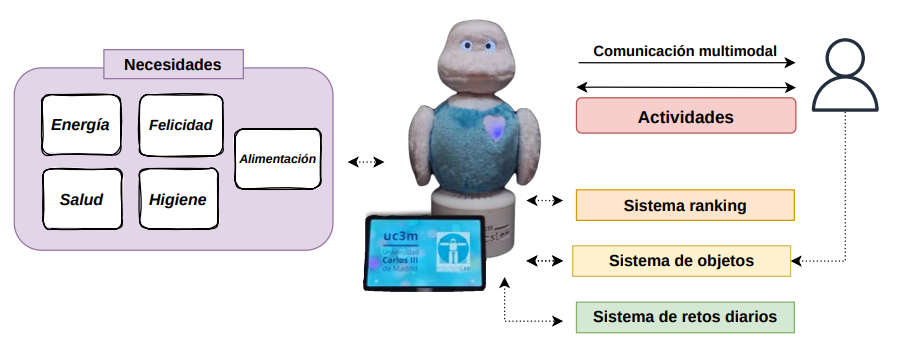
Aplicando de estrategias psicológicas y sociales para incrementar el vínculo en interacción humano-robot
Aplicando de estrategias psicológicas y sociales para incrementar el vínculo en interacción humano-robot [Jornadas de Robótica, Educación y Bioingeniería 2022]
Enhancing the bond in human-robot interaction via social psychology and game theory principles, aiming to build trust and increase the usability of social robots.
Read Publication